En el siguiente programas se realizo la simulación tanto física como virtual de un semáforo a cuatro esquinas, los materiales utilizados ademas de los leds, resistencias y protoboard que son los componentes básicos, también es necesario tener una raspberry pi 3 con python instalado, con las librerías de turtle y gpio.
El funcionamiento es básico, los led se aterrizan a tierra y las entradas de voltaje serán aterrizadas a los pines GPIO de la raspberry que dependiendo de las sentencias mandaran voltaje o no mandaran nada a sus respectivos leds.
La lógica de un semáforo de 4 esquinas es: mientras un semáforo este en verde los otros tres deben de estar en rojo y hacer el intercambio en sentido horario.
CÓDIGO DEL PROGRAMA
from turtle import *
import RPi.GPIO as gpio
import time
t=Turtle()
S1=Turtle()
S2=Turtle()
S3=Turtle()
S4=Turtle()
screen=t.getscreen()
setup(1100,650,0,0)
screensize(1000,600)
colormode(255)
#fondo carretera
t.fillcolor(83,72,83)
t.begin_fill()
t.penup()
t.goto(-500,300)
t.pendown()
t.goto(500,300)
t.goto(500,-300)
t.goto(-500,-300)
t.goto(-500,300)
t.end_fill()
t.fillcolor(0,150,0)
t.penup() #csi
t.goto(-500,300)
t.pendown()
t.begin_fill()
t.goto(-100,300)
t.goto(-100,100)
t.goto(-500,100)
t.goto(-500,300)
t.end_fill()
t.fillcolor(0,150,0)
t.penup() #csd
t.goto(100,300)
t.pendown()
t.begin_fill()
t.goto(500,300)
t.goto(500,100)
t.goto(100,100)
t.goto(100,300)
t.end_fill()
t.fillcolor(0,150,0)
t.penup() #cid
t.goto(100,-100)
t.pendown()
t.begin_fill()
t.goto(500,-100)
t.goto(500,-300)
t.goto(100,-300)
t.goto(100,-100)
t.end_fill()
t.fillcolor(0,150,0)
t.penup()
t.goto(-100,-100)
t.pendown()
t.begin_fill()
t.goto(-500,-100)
t.goto(-500,-300)
t.goto(-100,-300)
t.goto(-100,-100)
t.end_fill()
#banquetas
t.penup() #bsi
t.goto(-100,100)
t.fillcolor(179,166,177)
t.pendown()
t.begin_fill()
t.goto(-100,300)
t.goto(-150,300)
t.goto(-150,150)
t.goto(-500,150)
t.goto(-500,100)
t.goto(-100,100)
t.end_fill()
t.penup()#bsd
t.goto(100,100)
t.fillcolor(179,166,177)
t.pendown()
t.begin_fill()
t.goto(100,300)
t.goto(150,300)
t.goto(150,150)
t.goto(500,150)
t.goto(500,100)
t.goto(100,100)
t.end_fill()
t.penup()#bid
t.goto(100,-100)
t.fillcolor(179,166,177)
t.pendown()
t.begin_fill()
t.goto(500,-100)
t.goto(500,-150)
t.goto(150,-150)
t.goto(150,-300)
t.goto(100,-300)
t.goto(100,-100)
t.end_fill()
t.penup()#bii
t.goto(-100,-100)
t.fillcolor(179,166,177)
t.pendown()
t.begin_fill()
t.goto(-500,-100)
t.goto(-500,-150)
t.goto(-150,-150)
t.goto(-150,-300)
t.goto(-100,-300)
t.goto(-100,-100)
t.end_fill()
#franjas
t.penup()
t.goto(0,300)
t.pencolor("white")
t.pensize(10)
t.pendown()
t.rt(90)
for i in range(4):
t.fd(30)
t.penup()
t.fd(30)
t.pendown()
t.penup()
t.goto(0,-300)
t.pendown()
t.rt(180)
for i in range(4):
t.fd(30)
t.penup()
t.fd(30)
t.pendown()
t.penup()
t.goto(-500,0)
t.pendown()
t.rt(90)
for i in range(6):
t.fd(30)
t.penup()
t.fd(30)
t.pendown()
t.penup()
t.goto(500,0)
t.pendown()
t.rt(180)
for i in range(6):
t.fd(30)
t.penup()
t.fd(30)
t.pendown()
t.rt(180)
t.pensize(1)
#semaforo 1
t.pencolor("black")
t.penup()
t.fillcolor("white")
t.goto(-100,100)
t.pendown()
t.begin_fill()
t.goto(0,100)
t.goto(0,130)
t.goto(-100,130)
t.goto(-100,100)
t.end_fill()
t.penup()
t.goto(-30,115)
t.dot(20,0,50,0) #verde
t.goto(-60,115)
t.dot(20,50,50,0) #amarillo
t.goto(-90,115)
t.dot(20,50,0,0) #rojo
#semaforo 2
t.penup()
t.fillcolor("white")
t.goto(100,100)
t.pendown()
t.begin_fill()
t.goto(130,100)
t.goto(130,0)
t.goto(100,0)
t.goto(100,100)
t.end_fill()
t.penup()
t.goto(115,30)
t.dot(20,0,50,0) #verde
t.goto(115,60)
t.dot(20,50,50,0)#amarillo
t.goto(115,90)
t.dot(20,50,0,0) #rojo
#semaforo 3
t.penup()
t.fillcolor("white")
t.goto(100,-100)
t.pendown()
t.begin_fill()
t.goto(100,-130)
t.goto(0,-130)
t.goto(0,-100)
t.goto(100,-100)
t.end_fill()
t.penup()
t.goto(30,-115)
t.dot(20,0,50,0) #verde
t.goto(60,-115)
t.dot(20,50,50,0) #amarillo
t.goto(90,-115)
t.dot(20,50,0,0) #rojo
#semaforo 4
t.penup()
t.fillcolor("white")
t.goto(-100,-100)
t.pendown()
t.begin_fill()
t.goto(-100,0)
t.goto(-130,0)
t.goto(-130,-100)
t.goto(-100,-100)
t.end_fill()
t.penup()
t.goto(-115,-30)
t.dot(20,0,50,0) #verde
t.goto(-115,-60)
t.dot(20,50,50,0) #amarillo
t.goto(-115,-90)
t.dot(20,50,0,0) #rojo
#posicionando las tortugas coches
S1.shape("turtle")
S2.shape("turtle")
S3.shape("turtle")
S4.shape("turtle")
S1.penup()
S2.penup()
S3.penup()
S4.penup()
S1.goto(-50,300)
S1.rt(90)
S2.goto(500,50)
S2.rt(180)
S3.goto(50,-300)
S3.lt(90)
S4.goto(-500,-50)
##activar las terminales del semaforo
#salidas
gpio.setmode(gpio.BOARD)
gpio.setup(36,gpio.OUT) #verde semaforo 1
gpio.setup(38,gpio.OUT) #amarillo semaforo 1
gpio.setup(40,gpio.OUT) #rojo semaforo 1
gpio.setup(29,gpio.OUT) #verde semaforo 2
gpio.setup(31,gpio.OUT) #amarillo semaforo 2
gpio.setup(33,gpio.OUT) #rojo semaforo 2
gpio.setup(22,gpio.OUT) #verde del semaforo 3
gpio.setup(24,gpio.OUT)#amarillo del semaforo 3
gpio.setup(26,gpio.OUT) #rojo semaforo 3
gpio.setup(11,gpio.OUT) #verde semaforo 4
gpio.setup(13,gpio.OUT) #amarillo semaforo 4
gpio.setup(15,gpio.OUT) #rojo semaforo 4
t.hideturtle()
for i in range(2):
t.penup()
t.goto(-30,115)
t.dot(20,0,255,0)#verde prendido del semaforo 1
t.goto(115,90)
t.dot(20,255,0,0)
t.goto(90,-115)
t.dot(20,255,0,0)
t.goto(-115,-90)
t.dot(20,255,0,0)
gpio.output(36,gpio.HIGH)# verde del semaforo 1 durante 3s
gpio.output(38,gpio.LOW)
gpio.output(40,gpio.LOW)
gpio.output(29,gpio.LOW)
gpio.output(31,gpio.LOW)
gpio.output(33,gpio.HIGH) #ROJO DEL SEMAFORO 2 ENCENDIDO
gpio.output(22,gpio.LOW)
gpio.output(24,gpio.LOW)
gpio.output(26,gpio.HIGH) #rojo de semaforo 3 encendido
gpio.output(11,gpio.LOW)
gpio.output(13,gpio.LOW)
gpio.output(15,gpio.HIGH) #rojo semaforo 4 encendido
for i in range(3):
a=2
S1.shapesize(a*1,a*3,a*3)
S1.speed(3)
S1.showturtle()
S1.fd(600)
S1.hideturtle()
S1.goto(-50,300)
time.sleep(1)
a=a+1
time.sleep(0.1)
t.goto(-30,115)
t.dot(20,0,50,0)
t.goto(-60,115)
t.dot(20,255,255,0)
gpio.output(36,gpio.LOW)
gpio.output(38,gpio.HIGH) #ENCIENDE LED AMARILLO DE SEMAFORO 1
gpio.output(40,gpio.LOW)
gpio.output(29,gpio.LOW)
gpio.output(31,gpio.LOW)
gpio.output(33,gpio.HIGH)#ROJO SIGUE ENCENDIDO DE SEMAFORO 2
gpio.output(22,gpio.LOW)
gpio.output(24,gpio.LOW)
gpio.output(26,gpio.HIGH) #rojo del semaforo 3 encendido
gpio.output(11,gpio.LOW)
gpio.output(13,gpio.LOW)
gpio.output(15,gpio.HIGH) #rojo semaforo 4 encendido
time.sleep(1)
t.goto(-60,115)
t.dot(20,50,50,0)
t.goto(-90,115)
t.dot(20,255,0,0)#enciende rojo de semaforo 1
t.goto(115,90)
t.dot(20,50,0,0)
t.goto(115,30)
t.dot(20,0,255,0) #enciende verde de semaforo 2
gpio.output(36,gpio.LOW)
gpio.output(38,gpio.LOW)
gpio.output(40,gpio.HIGH) #ENCIENDE ROJO DE SEMAFORO 1 durante 3s
gpio.output(29,gpio.HIGH) #ENCIENDE VERDE DE SEMAFORO 2
gpio.output(31,gpio.LOW)
gpio.output(33,gpio.LOW)
gpio.output(22,gpio.LOW)
gpio.output(24,gpio.LOW)
gpio.output(26,gpio.HIGH)#rojo de semaforo 3 encendido
gpio.output(11,gpio.LOW)
gpio.output(13,gpio.LOW)
gpio.output(15,gpio.HIGH) #rojo de semaforo 4 encendido
for i in range(4):
b=3
S2.shapesize(b*1.33,b*1,b*2)
S2.speed(3)
S2.showturtle()
S2.fd(1000)
S2.hideturtle()
S2.goto(500,50)
time.sleep(1)
b=b+1
time.sleep(0.1)
t.goto(115,30)
t.dot(20,0,50,0) #apaga verde de semaforo 2
t.goto(115,60)
t.dot(20,255,255,0)#enciende amarillo de semaforo 2 #seguirle de aqui
gpio.output(36,gpio.LOW)
gpio.output(38,gpio.LOW)
gpio.output(40,gpio.HIGH)#ROJO DE SEMAFORO 1 AUN PRENDIDO
gpio.output(29,gpio.LOW)
gpio.output(31,gpio.HIGH) #AMARILLO DE SEMAFORO 2 PRENDIDO
gpio.output(33,gpio.LOW)
gpio.output(22,gpio.LOW)
gpio.output(24,gpio.LOW)
gpio.output(26,gpio.HIGH) #rojo de semaforo 3 encendido
gpio.output(11,gpio.LOW)
gpio.output(13,gpio.LOW)
gpio.output(15,gpio.HIGH) #rojo de semaforo 4 encendido
time.sleep(1)
t.goto(115,60)
t.dot(20,50,50,0)#apago amarillo de semaforo 2 #seguirle de aqui
t.goto(115,90)
t.dot(20,255,0,0)#enciendo rojo de semaforo 2
t.goto(90,-115)
t.dot(20,50,0,0)#apago rojo de semaforo 3
t.goto(30,-115)
t.dot(20,0,255,0)#prendo verde de semaforo 3
gpio.output(36,gpio.LOW)
gpio.output(38,gpio.LOW)
gpio.output(40,gpio.HIGH)
gpio.output(29,gpio.LOW)
gpio.output(31,gpio.LOW)
gpio.output(33,gpio.HIGH)
gpio.output(22,gpio.HIGH) #verde de semaforo 3 encendido
gpio.output(24,gpio.LOW)
gpio.output(26,gpio.LOW)
gpio.output(11,gpio.LOW)
gpio.output(13,gpio.LOW)
gpio.output(15,gpio.HIGH) #rojo se,aforo 4 encendido
for i in range(2):
c=1.5
S3.shapesize(c*1.5,c*2.5,c*3.5)
S3.speed(3)
S3.showturtle()
S3.fd(600)
S3.hideturtle()
S3.goto(50,-300)
time.sleep(1)
c=c+1
time.sleep(0.1)
t.goto(30,-115)
t.dot(20,0,50,0)#prendo verde de semaforo 3
t.goto(60,-115)
t.dot(20,255,255,0)#prendo amarillo de semaforo 3
gpio.output(36,gpio.LOW)
gpio.output(38,gpio.LOW)
gpio.output(40,gpio.HIGH)
gpio.output(29,gpio.LOW)
gpio.output(31,gpio.LOW)
gpio.output(33,gpio.HIGH)
gpio.output(22,gpio.LOW)
gpio.output(24,gpio.HIGH) #amarillo de semafor 3 encendido
gpio.output(26,gpio.LOW)
gpio.output(11,gpio.LOW)
gpio.output(13,gpio.LOW)
gpio.output(15,gpio.HIGH) #rojo semaforo 4 encendido
time.sleep(1)
t.goto(60,-115)
t.dot(20,50,50,0)#apago amarillo de semaforo 3
t.goto(90,-115)
t.dot(20,255,0,0)#prendo rojo de semaforo 3
t.goto(-115,-90)
t.dot(20,50,0,0)#apago rojo de semaforo 4
t.goto(-115,-30)
t.dot(20,0,255,0) #prendo verde de semaforo 4
gpio.output(36,gpio.LOW)
gpio.output(38,gpio.LOW)
gpio.output(40,gpio.HIGH)
gpio.output(29,gpio.LOW)
gpio.output(31,gpio.LOW)
gpio.output(33,gpio.HIGH)
gpio.output(22,gpio.LOW)
gpio.output(24,gpio.LOW)
gpio.output(26,gpio.HIGH)
gpio.output(11,gpio.HIGH) #verde semaforo 4 encendido
gpio.output(13,gpio.LOW)
gpio.output(15,gpio.LOW)
for i in range(3):
d=2.33
S4.shapesize(d*1,d*4,d*1.333)
S4.speed(3)
S4.showturtle()
S4.fd(1000)
S4.hideturtle()
S4.goto(-500,-50)
time.sleep(1)
d=d+1
time.sleep(0.1)
t.goto(-115,-30)
t.dot(20,0,50,0) #apago verde de semaforo 4
t.goto(-115,-60)
t.dot(20,255,255,0)#prendo amarillo de semaforo 4
gpio.output(36,gpio.LOW)
gpio.output(38,gpio.LOW)
gpio.output(40,gpio.HIGH)
gpio.output(29,gpio.LOW)
gpio.output(31,gpio.LOW)
gpio.output(33,gpio.HIGH)
gpio.output(22,gpio.LOW)
gpio.output(24,gpio.LOW)
gpio.output(26,gpio.HIGH)
gpio.output(11,gpio.LOW)
gpio.output(13,gpio.HIGH) #amarillo semaforo 4 prendido
gpio.output(15,gpio.LOW)
time.sleep(1)
t.goto(-115,-60)
t.dot(20,50,50,0)#apago amarillo de semaforo 4
t.goto(-115,-90)
t.dot(20,255,0,0)#prendo rojo de semaforo 4
t.goto(-90,115)
t.dot(20,50,0,0)#apago rojo de semaforo 1
t.goto(115,90)
t.dot(20,50,0,0)
t.goto(90,-115)
t.dot(20,50,0,0)
t.goto(-115,-90)
t.dot(20,50,0,0)
S1.showturtle()
S1.goto(0,0)
S2.showturtle()
S2.goto(10,0)
S2.pencolor("white")
S2.write("¡¡¡CHOQUE MORTAL!!!!",False,"center",("arial",20,"bold italic"))
gpio.cleanup()
screen.exitonclick()
ESCENARIO SIMULADO

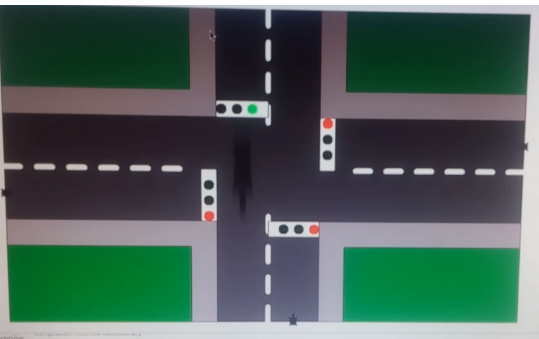
ORDEN DE LOS LED'S

SECUENCIA DE LOS SEMÁFOROS (EXPLICADO EN SOLO 2, ES LA MISMA LOGICA PARA 3 O 4)
SEMÁFORO 1 EN VERDE EL OTRO ESTA EN ROJO

SEMÁFORO 1 EN AMARILLO EL OTRO ESTA EN ROJO

SEMÁFORO 1 EN ROJO EL OTRO ESTA EN VERDE

Y DE ESTA MANERA SE REPITE EL CICLO POR EL TIEMPO QUE SEA NECESARIO
Comentarios
Publicar un comentario